
2025年4月21日,人工智能赋能泛在时空科技国际论坛在东南大学四牌楼校区成功举办,本次论坛聚焦泛在时空科技领域的最新进展,交流人工智能在卫星定位、无人驾驶、基础设施智能运维等领域中的最新研究成果。
来自英国诺丁汉大学(University of Nottingham)、拉夫堡大学(Loughborough University)、南京航空航天大学、东南大学等国内外高校与机构的三十余名专家学者、部分硕博士研究生参加了会议,共同探讨人工智能(AI)与泛在时空科技的交叉创新与应用前景。
本次论坛由东南大学仪器科学与工程学院组织承办,东南大学首席教授孟晓林老师担任论坛顾问,仪器科学与工程学院副院长潘树国教授、安向东教授担任论坛主席,张小国教授、阳媛副教授担任论坛副主席。论坛由安向东教授和拉夫堡大学Craig Hancock博士共同主持。


孟晓林教授发表开场致辞,对各位专家学者的到来致以诚挚的欢迎。论坛特别邀请到了诺丁汉大学、拉夫堡大学、南京航空航天大学和东南大学等单位的国内外学者分别就各自领域的前沿技术与AI应用进行了精彩的学术汇报。
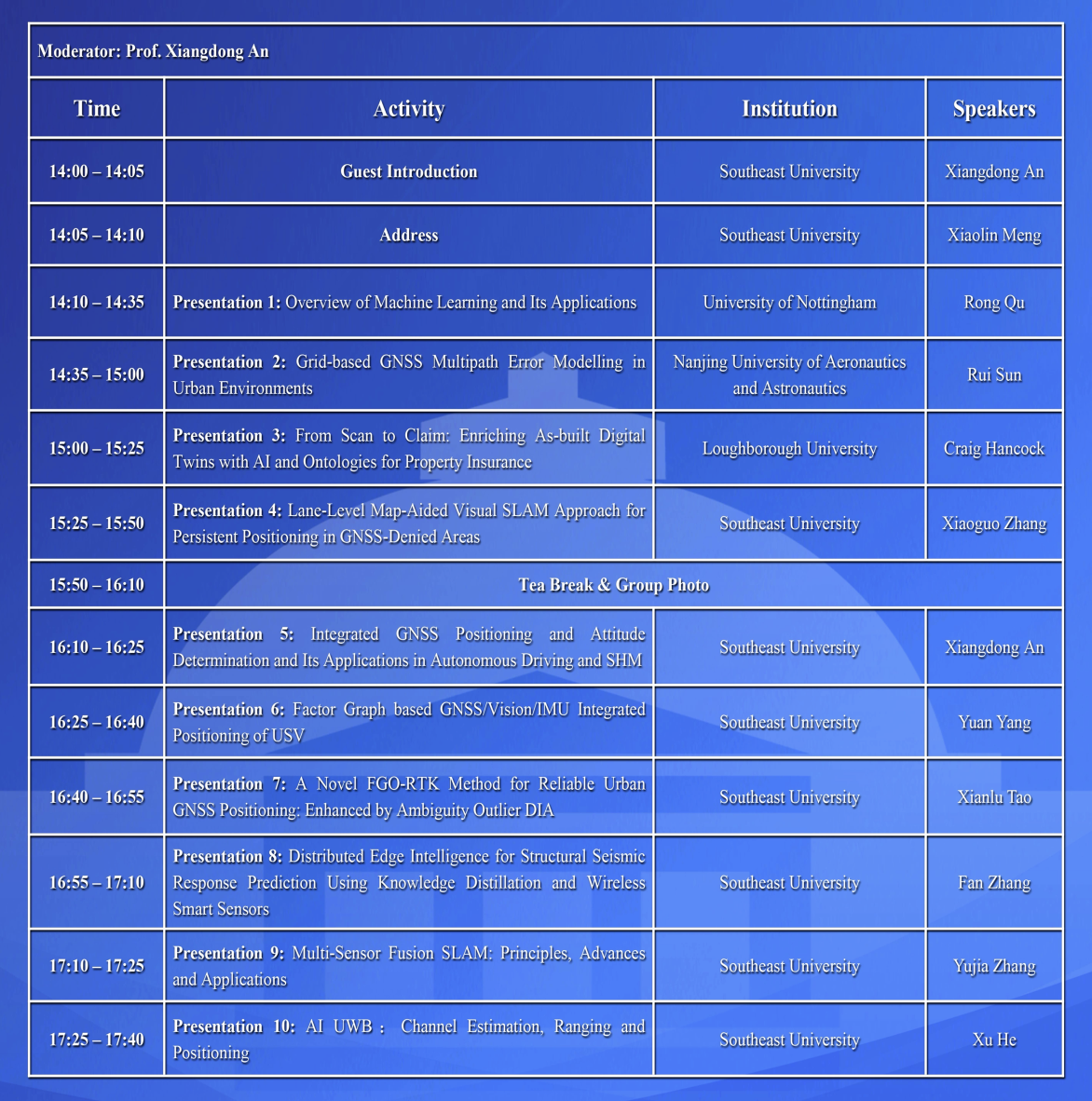
其中,诺丁汉大学屈嵘教授、南京航空航天大学孙蕊教授、拉夫堡大学Craig Hancock博士分别作了题为“Overview of Machine Learning and Its Applications”、“Grid-based GNSS Multipath Error Modelling in Urban Environments”和“From Scan to Claim: Enriching As-built Digital Twins with Al and Ontologies for Property Insurance”的学术报告。
东南大学张小国教授、安向东教授、阳媛副教授、陶贤露博士、张凡博士、张羽佳博士、博士研究生何旭分别作了题为“Lane-Level Map-Aided Visual SLAM Approach for Persistent Positioning in GNSS-Denied Areas”、“Integrated GNSS Positioning and Attitude Determination and Its Applications in Autonomous Driving and SHM”、“Factor Graph based GNSS/Vision/IMU Integrated Positioning of USV”、“A Novel FGO-RTK Method for Reliable Urban GNSS Positioning: Enhanced by Ambiguity Outlier DIA”、“Distributed Edge Intelligence for Structural Seismic Response Prediction Using Knowledge Distillation and Wireless Smart Sensors”、“Multi-Sensor Fusion SLAM: Principles, Advances and Applications”和“Al UWB: Channel Estimation, Ranging and Positioning”的学术报告。
会议期间,与会师生针对“AI算法的时空泛化能力”、“动态神经网络与静态神经网络”等话题展开了热烈讨论。最后,孟晓林教授为每位汇报嘉宾颁发了纪念证书,感谢他们为推动AI与泛在时空科技发展与交流作出的贡献。
本次论坛不仅搭建了高水平的国际学术交流平台,深化了国际协作的共识,更促进了产学研协同创新,推动了人工智能与时空科技的融合发展。
通讯稿作者:印文轩、张羽佳
审核人:潘树国
2025年04月23日



