
近日,朱利丰老师团队在可穿戴式力反馈技术上取得新进展,提出了被动式原件提供可控力、力矩反馈的新模式。团队论文“SmartSpring: a Low-Cost Wearable Haptic VR Display with Controllable Passive Feedback”被 IEEE ISMAR 2023接收并推荐为一区期刊IEEE TVCG论文,于2023年10月17日在澳大利亚悉尼举办的IEEE ISMAR 2023上做了口头报告。
虚拟现实技术的出现彻底改变了用户与虚拟环境的互动方式,已经彻底改变了用户与虚拟环境的互动方式,通过头戴式显示器提供视听反馈,可以营造出身临其境的体验。为了进一步提升用户与虚拟物体的交互体验并增强用户的沉浸感,力触觉设备被引入虚拟现实应用中。力触觉设备通过在交互式的三维虚拟场景中为用户提供关于物体刚度、柔韧度等属性的感知,从而增强虚拟现实中的沉浸感和交互性。现有的力反馈设备主要通过电机、气压等驱动直接控制交互力,此类方案往往需要精密的传感器和驱动器,因此具有较高的研发成本、制作成本和维护成本;为了实现主动力觉反馈,还需要设计复杂的控制系统和算法系统,导致整体系统的复杂性较高;另外,主动力反馈设备可能出现故障或误操作,这可能会导致安全风险。
与造价高昂的主动力反馈设备不同,基于结构物理特性的被动力触觉设备具有成本低、轻量化的特点。针对传统被动力触觉设备难以连续输出精准特定力的问题,朱利丰老师团队提出了一种基于弹簧连杆结构的手持式被动力反馈设备,通过调节弹簧连杆结构的构造,该设备可以提供二自由度的力反馈,从而提供力渲染、刚度渲染和扭矩渲染。
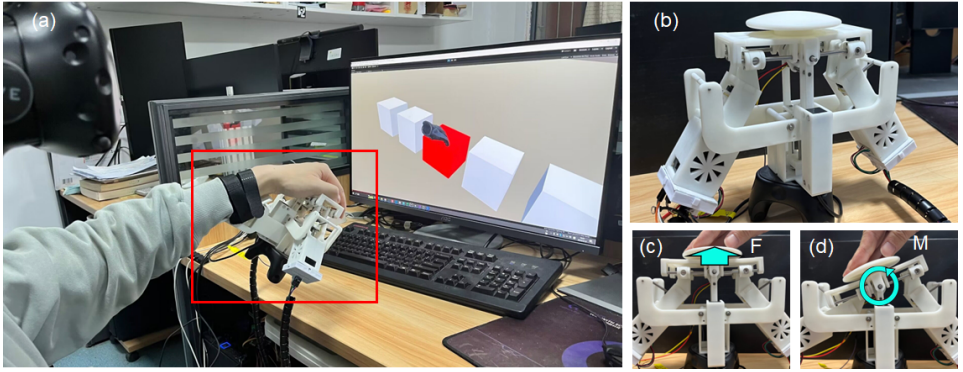
图1 提出的被动力触觉设备样机
如图2所示,团队提出的被动力触觉设备包括力生成模块、传感模块、限位模块、追踪器以及交互垫。用户首先将力反馈设备绑定在小臂,然后根据虚拟现实的三维场景按压交互垫,交互垫产生位移,然后系统根据传感模块的反馈信号调整力生成模块的构造,从而通过交互垫输出连续指定的力信号。其中,力生成模块是一种弹簧连杆结构,通过调节弹簧的长度和方向,可以连续输出特定的力。
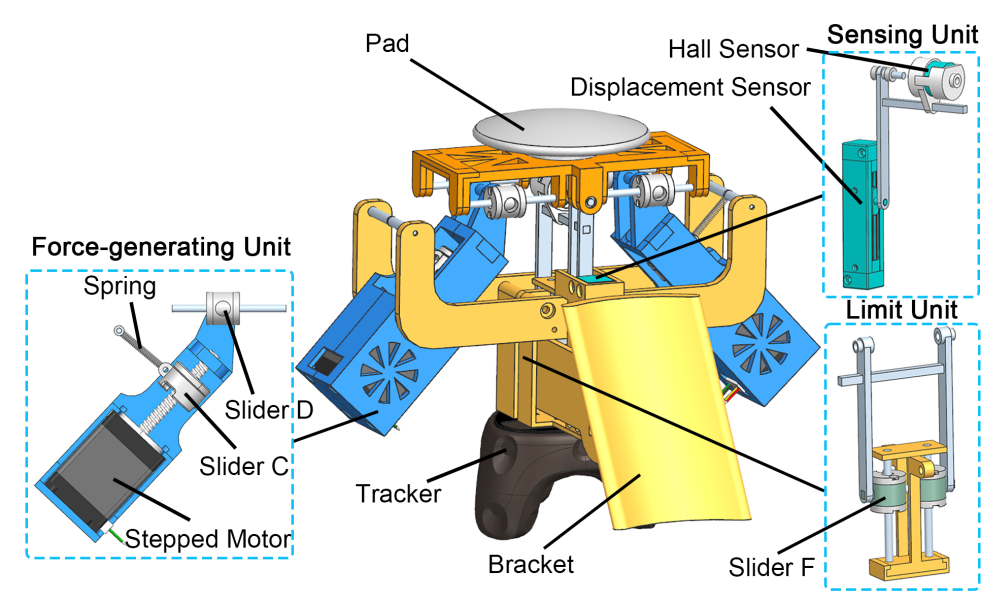
图2 力触觉设备结构图
基于触觉设备的系统如图3所示,建立的虚拟环境在台式机上运行,而嵌入式系统控制电机并通过串行端口与计算机通信,来自虚拟环境的视觉反馈通过头戴式显示器发送给用户。在运行期间,当虚拟手按压虚拟场景中的对象时,触觉渲染模块计算所需的力、刚度或扭矩,并将触觉数据传输到力反馈设备,随后力反馈设备更新其弹簧连杆结构的构造从而向用户输出特定的触觉信号。
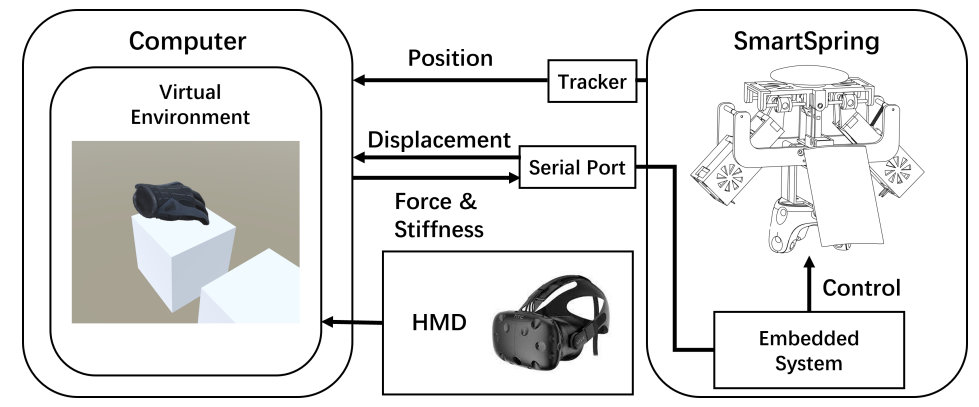
图3 基于该触觉设备的虚拟现实系统
使用该力触觉设备进行参加虚拟物体辨别和海绵模拟实验。虚拟物体辨别实验中,计算参与者对每个对象进行正确排序的频率,基于实验结果,力、刚度和扭矩反馈的总成功率分别为95%、100%和80%,结果表明,该力触觉设备能够生成不同的触觉反馈,并且用户可以准确辨别这些反馈。海绵模拟实验中,比较了力触觉设备和真实海绵在按压过程中的力反馈,分析力触觉设备渲染的力触觉与按压真实海绵时测量力之间的差异,从而辨别该力触觉设备的渲染真实感,结果显示在不同范围下的均方根误差均较小,说明该力触觉设备能够有效模拟真实海绵的力反馈。
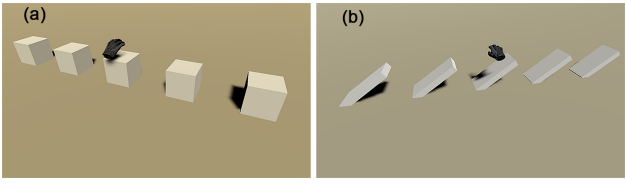
图4 虚拟物体辨别实验
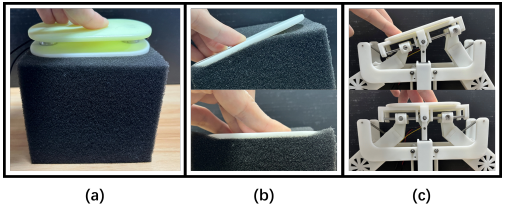
图5 海绵模拟实验
该工作展示了动态调整被动弹簧结构以提供可控触觉反馈的潜力,在定制化设计具有不同力范围和动态性能要求的可穿戴力反馈设备的具有广阔应用前景,可以为VR、AR和MR等应用提供更通用有效的平价产品。相关技术所形成的论文被第22届IEEE国际混合现实和增强现实大会接收,并推荐至IEEE可视化与图形汇刊(CCF A类)。论文作者硕士研究生张宏坤与博士研究生周科宏于2023年10月16日至10月20日付澳大利亚悉尼参加了此次会议,并在多模态交互主题的分会场中口头报告了该项工作,受到了与会人员的热烈好评。
供稿:朱利丰



