
过去十年中,低成本和小型化的多旋翼无人机技术取得了巨大进步,已广泛应用于航拍测绘、农林植保、安防巡检等领域。这些应用场景局限于与环境非接触式的被动观测或简单的载荷释放。当前,许多与环境物理交互的应用场景对旋翼无人机的主动作业能力提出了更高的要求,例如物资运输、无损检测、表面清洁、设备部署、维修装配等。在这些环境物理交互应用需求驱动下,自2009年以来,飞行机器人领域兴起了一个新的研究方向,称为飞行机械臂。飞行机械臂是由无人机和机械臂组成的复合系统,兼具无人机的灵活机动能力和机械臂的操作能力,可以快速飞抵人类或地面机器人难以到达的地点执行各种环境物理交互作业任务,有望解决传统人工高处作业方式一直存在的高风险、高成本、低效率三大痛点。
传统欠驱动旋翼无人机的动力单元推力方向平行,无法在不改变姿态的情况下产生水平推力,限制了飞行机械臂的多向交互能力与应用场景。针对接触作业过程中普通旋翼无人机难以同时保持姿态稳定并提供水平推力的问题,宋老师团队设计了一种全驱动飞行机械臂,通过改变动力单元旋翼安装角度的方式使得每个动力单元产生非平行方向的推力,并从控制结构上实现了位置与姿态的解耦控制。提出了用于移动接触作业的接触力控制方法,将接触检测任务分为接近阶段与移动接触阶段,采用力/运动混合控制器完成接触面法线方向上的力控制。户外实验结果表明,所设计的全驱动飞行机械臂实现了稳定飞行和移动接触作业,与欠驱动平台相比,飞行过程中的位置移动不依赖于姿态改变,且在移动接触过程中实现了接触面法线方向上的接触力控制。
如图1所示,宋老师团队提出的全驱动飞行机械臂系统由全驱动六旋翼无人机和一个与其刚性连接的接触装置组成,无人机机架和接触装置的操作臂连杆均使用碳纤维材料,同时操作臂连杆采用空心结构,在减轻重量的同时满足了强度的需求,并在机架底部和机臂处均安装了固定支架,以保证末端装置与机身的稳定连接。接触装置末端安装了弹性装置,可以吸收部分接触瞬间产生的冲击力,并在移动接触过程中使用滚轮减小摩擦力,提升末端的移动接触能力。

图 1全驱动旋翼飞行机械臂样机结构图
欠驱动旋翼无人机X、Y 方向的位置控制依赖于姿态控制器的调节,无法实现3 维位置的独立控制,全驱动旋翼无人机则在底层控制结构上实现了位置与姿态的解耦控制,其运动控制器架构如图2所示。飞行机械臂的接触作业需要全驱动无人机与目标表面建立稳定的接触,将接触过程分为接近和移动接触2个阶段进行控制,2 个阶段的状态切换条件为力传感器获得的接触力测量值。飞行机械臂自由飞行至目标作业面一定距离后进入接近阶段,采用速度/位置混合控制器进行控制;当接触力达到一定阈值时,进入移动接触阶段,无人机在接触面法线方向上进行力控制,并沿接触面表面滑动,采用力/运动混合控制器进行控制。

图2飞行机械臂运动控制器框图
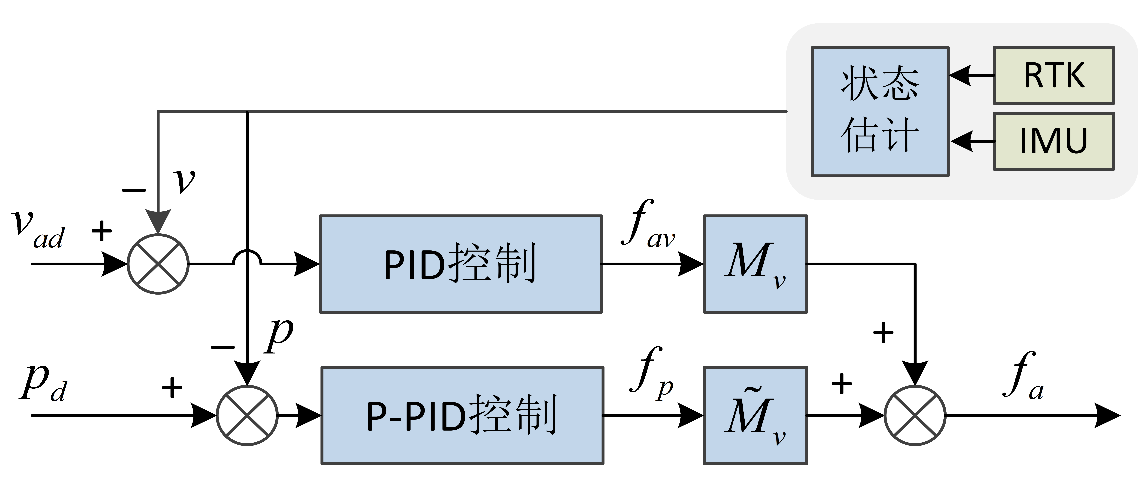
图3 速度/位置混合控制器框图
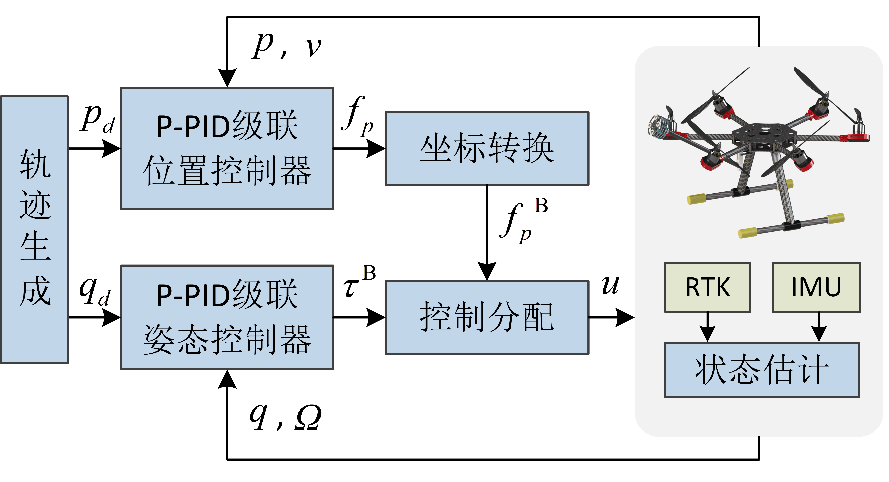
图4 力/运动混合控制器框图
户外飞行实验结果表明,样机完成了设定了矩形飞行轨迹跟踪,俯仰角与滚转角保持平稳且变化范围控制在±1.5゜以内,在完成平行运动的同时保持了姿态的稳定,实现了位置与姿态的解耦控制。移动接触实验结果表明,样机实现了在30度倾角的白板上的稳定滑动接触。移动接触阶段姿态角变化范围可控制在±3゜以内,实现了飞行机械臂在接触作业过程中的姿态角基本稳定。接触过程中力传感器测量得到的接触力数据是实现力控制的关键因素,接触瞬间飞行机械臂与接触面会产生较大冲击,接触装置末端的弹性装置对此过程中的冲击力进行一定的缓冲,此时接触力出现峰值并有一定波动。经过短暂的冲击后,移动接触阶段的接触力在一定的精度范围内稳定在3N左右,实现了稳定的恒力接触。
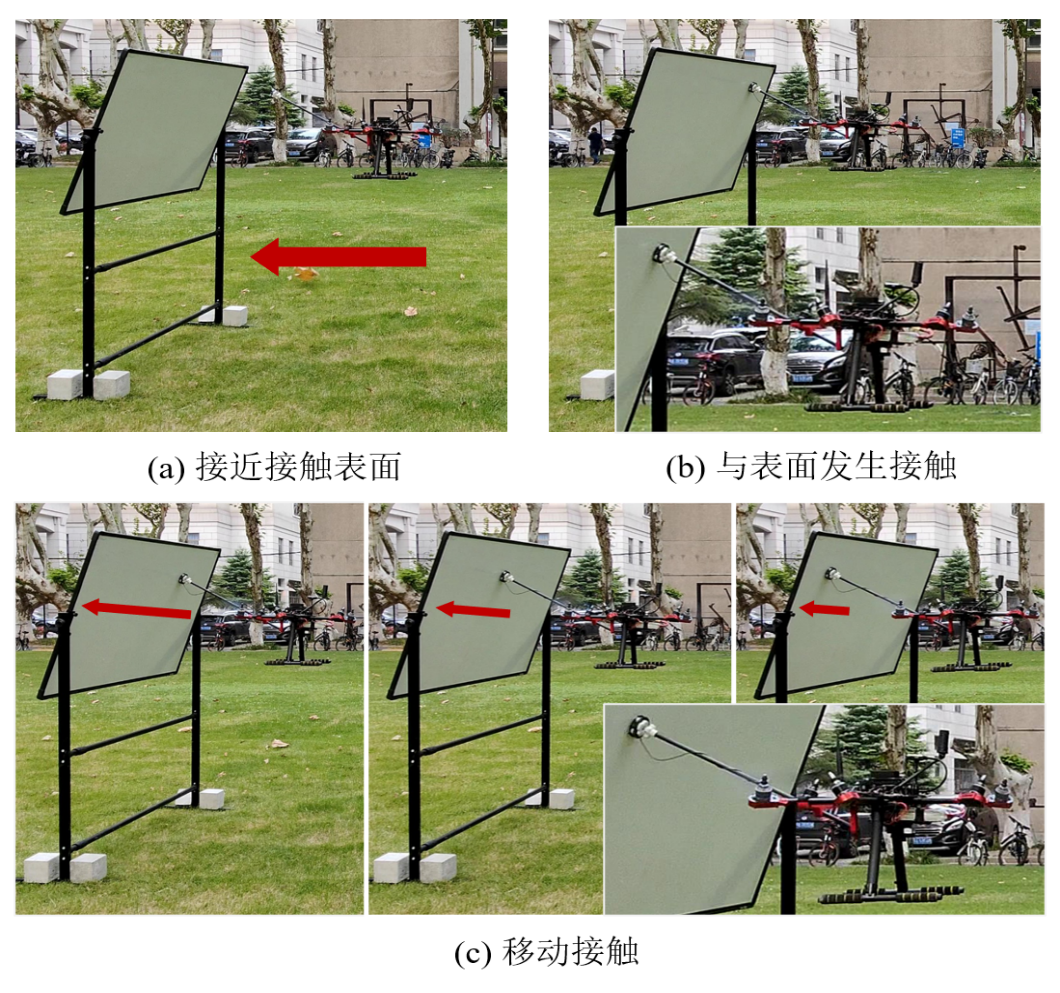
图5 户外接触实验过程
针对传统欠驱动旋翼无人机无法独立提供水平推力的问题,宋老师团队提出了一种倾斜旋翼安装角度的全驱动飞行机械臂设计方法,并且提出了位置控制与姿态控制解耦的控制器架构,进而针对接触作业的接近阶段和移动接触阶段设计了力/运动混合控制器,完成了对目标表面的稳定接触作业。户外飞行实验与在移动接触实验结果验证了所提方法的有效性。全驱动飞行平台可以灵活提供多向推力,搭载低自由度机械臂甚至机身固连延长杆即可实现多角度的接触作业功能,在隧洞、桥梁、电力杆塔、油气储罐等复杂结构基础设施巡检运维作业中具有广阔的应用前景。



