
机器人遥操作,是指在相关机器人控制中把人类操作包含在控制回路中,任何的上层规划和认知决定都是由人类用户下达,而机器人本体只是负责相应的实体应用。当机器人处理复杂的感知和大量任务时,在快速做出决策和处理极端情况时,遥操作远远优于智能编程。目前遥操作已广泛应用在医疗领域、极端环境探索如太空与深海场景、防恐防爆应用场景,以及基于工业机械臂的自动化生产中。
今天我们有幸邀请到了李会军老师,下面让我们跟着李老师一起走进遥操作机器人的世界。
01 人物介绍

李会军 博士生导师,硕士生导师 教授(研究员)
目前承担国家重点研发计划课题等科研项目3项,已完成863高技术计划课题、国家自然科学基金等科研项目7项。作为骨干研究人员参与完成863课题、国家“973”项目二级课题及国家自然科学基金项目等10余项机器人与人机交互相关的国家和省部级课题以及航天领域等多项横向技装课题。在《IEEE Transactions》、《宇航学报》等国内外核心刊物及重要国际会议上发表论文20余篇,论文被SCI他引70余次。作为第一发明人申报国家发明专利10余项,其中3项已授权。获国家技术发明二等奖1项(第三完成人,2017)、教育部科技进步一等奖1项(第二完成人,2016)、江苏省科技进步一等奖(第三完成人,2014)1项等国家和省部级奖励5项。2015年入选江苏省“双创计划”科技副总,2018年入选江苏省“333工程”培养对象并获项目资助。
Q1 机器人我们都有一定的了解,而您所研究的“遥操作机器人”,添加了一个“遥”字,请问您能讲解一下“遥操作”的特点和它带来的影响吗?
李:遥操作是指操作者通过手控器、手柄等人机交互装置和设备控制远地的机器人完成作业任务的行为。操作者通过主机器人向从机器人发送指令,同时感受到从机器人和外界的交互信息,从而完成遥操作任务。这种主从式系统通常被认为是一种有效的遥操作方法,它实际上是一个人、机协作系统,通过遥操作将操作者的智能映射到任务环境中,借助于人的智能和经验来完成复杂环境下的作业。人在系统中的介入,能够弥补机器人在控制、传感以及人工智能等方面的不足。
随着人类探索领域的不断扩展,人类探索活动的危险性和复杂性日益增长,如空间探测、核能利用、远程制造、深海探测等。出于对操作者的安全考虑,这些活动往往需要引入遥操作机器人系统。随着人类空间活动的不断发展,特别是近年来各国对太阳系以及深空探索计划的逐步展开,将会有大量的空间生产、空间加工、空间装配、空间维护和修理工作。然而,向空间发送宇航员需要大量的资金,而且由于空间工作需要在一个了解不多并且不可控的环境中进行,舱外活动存在一定的危险,因此必须充分利用机器人技术,减小宇航员从事危险工作的代价和成本。但智能机器人的研究现状表明,由于受到机构、控制、传感和人工智能等支撑技术的限制,研制出能在未知或复杂环境下全自主方式工作的智能机器人,是短期内难以达到的目标。因此,利用现有技术以及人机合作的遥操作机器人概念,机器人也可以在许多空间任务中替代人,以降低成本和危险并且增强人类的活动能力。从长期观点看,遥操作是机器人完成复杂或危险环境下远地作业任务的主要手段,有助于扩大人类的探索活动范围,提升危险环境作业的能力。
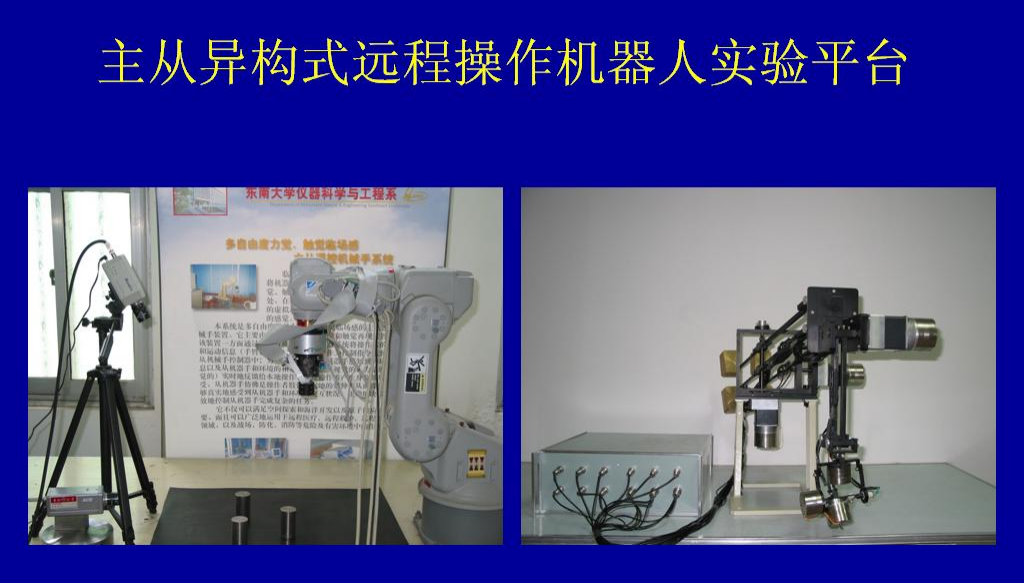
遥操作机器人平台(国家863高技术项目)
Q2 随着距离的增长,信号的衰减与时延也会更加的明显,对操作的影响也越来越大,这是一个十分严重的问题。请问您的团队是如何解决这一问题的呢?
李:时延问题是遥操作机器人系统控制面临的一个主要困难。为了消除或减小时延对机器人系统的影响,提高系统的操作性能,最早人们采用“移动-等待”的策略,即在操作过程中先移动一小步,等待一段时间得到力反馈后,再移动一小步。采用这种方法的结果是降低了系统的工作带宽,造成了力信息的模糊性,加重操作者的负担。为此,人们从控制的角度提出了许多解决方案,通过采用合理的控制算法控制遥操作系统主端和从端的力和位置信息,但是时延问题一直未能很好地解决,尤其大时延问题困难重重。因此,我们研究团队提出了基于虚拟预测环境的遥操作机器人控制方法。操作者根据建立在本地的从机器人及其工作环境的虚拟模型,通过交互设备操纵虚拟机器人,虚拟环境根据命令执行情况计算交互力,更新位置信息,并实时反馈给操作者。由于操作者与虚拟环境之间不存在时延,虚拟环境可以为操作者提供实时、稳定的视觉和力觉反馈,从而消除了时延对遥操作系统的影响。从理论上讲,这种方法应用前景更广,效果也更好。我们团队对机器人的虚拟预测环境建模技术、虚拟环境模型的在线修正技术等进行了理论和实验研究,相关成果为嫦娥三号探测车、空间站机械臂遥操作等提供了技术支持。


基于虚拟预测环境的遥操作机器人平台
Q3 目前您已在自己的领域中取得相当不菲的成就,能否请问您的团队之后有什么更进一步的研究思路或是设想?
李:这些研究都是团队共同努力的结果。后面我们主要还是两个方面的工作。一方面,在现有研究的基础上不断开拓新的研究方向和领域,根据学科发展和国家需求探索前沿的理论、技术和方法。另一方面,利用比较成熟的技术解决实际工程问题,为我国重大工程和民生服务提供支撑,继续将研究成果应用于载人航天、空间站、月球探测、康复医疗、核能利用、远程制造等领域。

遥操作军用侦察机器人参加上海世博会安保任务
03 总结
本次对李老师的访谈使我们增进了对遥操作机器人的了解,遥操作机器人技术在航天领域发挥了重要作用,我国载人航天与探月工程事业都用到了遥操作技术,相信遥操作技术将会极大的促进航天事业的发展,造福人类。
来源|东大仪科公众号



